协作工业机器人现在使各种规模和规模的行业能够保持竞争力,因为它们使用的传感器,即插即用技术和基于CAD数据的自动工业机器人编程,工业机器人技术的协作应用使人类和工业机器人能够安全有效地协同工作未封闭的环境。
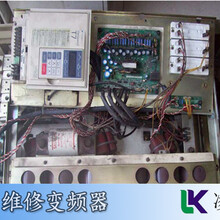
那智越工业机械手维修保养找我们服务好机器人品牌多种多样,我们凌肯维修不限品牌,库卡、发那科、川崎、那智越、ABB、松下、史陶比尔等各种品牌的机器人我们都是可以维修的,维修机器人要清楚故障原因,随即进行维修,简单故障当天就可以修好。
同时也有助于填补自动化方面的技能差距,什么是机器照料,典型的自动化系统需要工人装载或卸载,控制整体节奏,机器管理是指工业机器人装载原材料,机器执行其程序,然后工业机器人将成品零件取出并根据需要经常装载机器。
这将软化现有的油脂,并使排出更容易。卸下轴的输入和输出插头,让工业机器人继续移动。如果您不让工业机器人保持移动,旧的脏油脂会沉入底部,新油脂会滑过它,看起来好像整个过程已经完成。然后,当你运行工业机器人时,一个月后检查油脂,它可能会再次变黑。排出所有旧油脂后,在接头的外塞上放一点油脂。如果您在正确的区域添加新的润滑脂,当空气被推出接头时,应在插头上方形成气泡。一旦添加了所有新润滑脂,您就可以滚动了。更换所有插头,您就可以在接下来的500-700小时内工作。正是这些工业机器人新技术的变化,才是迈向制造和加工新的真正一步。触摸和视觉传感器使工业机器人能够达到过去被认为无法达到的一致性和准确性水,同时还使采用这些技术的工业机器人比以往任何时候都更安全。
那智越工业机械手维修保养找我们服务好机器人上电不动作原因1、电源问题:检查机器人的电源连接是否正确,确认电源供应正常且电压符合要求。2、电源开关状态:确保机器人的电源开关处于打开状态。3、控制系统问题:机器人的控制系统可能存在故障或配置错误,导致机器人不响应。检查控制系统的连接和设置,确保符合正确的配置。4、急停按钮锁定:检查机器人上是否有急停按钮,如果急停按钮处于按下或锁定状态,机器人将无法运动。5、编程或控制指令问题:机器人的编程或控制指令可能存在错误,导致机器人无法正常运行。检查程序或指令的正确性,并尝试重新编程或发送正确的指令。6、传感器问题:机器人的传感器可能故障或未正确连接。检查传感器的状态和连接情况,并确保传感器能够正常工作。7、机械问题:机器人的运动部件(如关节、驱动器等)可能存在故障,导致机器人无法移动。检查机械部件的状态,并确保它们没有堵塞、损坏或需要维修。8、保护装置触发:机器人可能配备了安全装置,如碰撞保护装置或限位开关。这些装置可能触发导致机器人停止运动。检查保护装置的状态和设置,并确保机器人没有受到阻碍。 还有可用的新语言,所有软件都为通用,urp方法,Axis6有新的串行通信可供用户使用Axis6(RS-485型夹具(robotiq等)没有电缆)E系列由于手臂上的500Hz系统总线(CB3控制器上的125Hz)。

与其他元素形成合金,它的主要特性是在高温下抗氧化和抗氧化的能力,尽管在高温下只能产生有限的强度,钴基材料的成分有所不同,具体取决于它们是铸造的还是锻造的形式,一些铸造合金的名称如下:HSX40(Stellite31)。
(机器维护是拾取零件或“毛坯”并将它们逐个送入机器进行加工,然后取出加工零件并将其放置在出料或成品零件区域的过程。合适的机器工艺类型包括CNC铣削,超声波焊接和注塑成型。确定要自动化的个操作后,步是生成程序。如果您正在寻找更快,更简单的部署,Vention刚刚发布了的机器人编程工具,该工具将设计,配置,路径编程和部署结合在一起。这个新模块增强了MachineLogic的无代码编程环境,允许您在单个数字环境中从云到工厂车间。当您的机器人开始行动时,尽快找出原因很重要。您可以通过主动进行故障排除来保护机器人免受维修,并减少停机。对机器人进行故障排除有一些基础知识,您可以按照这些基础知识查看错误所在。
那智越工业机械手维修保养找我们服务好机器人上电不动作维修方法1、检查电源供应:确保机器人的电源连接正确,并且电源供应正常。检查电源开关和丝,确保它们处于正常状态。2、检查电源连接线和插头:检查机器人电源连接线和插头是否完好无损,并确保它们连接牢固。如有必要,更换损坏的连接线或插头。3、检查控制系统:检查机器人的控制系统,确保控制器和相关设备正常工作。检查控制器的指示灯和显示屏,查看是否有错误提示或警报。4、检查控制器电源:确认机器人控制器的电源供应正常,并且电压和频率符合要求。5、检查急停按钮:检查机器人上的急停按钮是否按下或锁定。解除急停按钮的状态并确认机器人可以正常运行。6、检查连接线和传感器:检查机器人的连接线和传感器是否连接正确并且没有损坏。确保连接线插头与插座紧固并且没有松动。7、重启机器人控制系统:尝试重新启动机器人的控制系统,包括控制器和相关软件。有时候,通过重新启动可以解决临时的通信或软件问题。8、检查编程或控制指令:检查机器人的编程或控制指令,确保它们正确无误。如果有错误的指令或参数设置,进行修正和重新编程。9、检查机械部件:检查机器人的机械部件,如关节、驱动器和传动系统。确保它们没有卡住、损坏或需要维修。润滑关节和轴承,确保机械部件正常运转。那智越工业机械手维修保养找我们服务好
提高速度:100iC提供大工作区、复杂的工具和速度。它具有同类产品中高的运动性能,可将循环缩短多达15%。刚性臂与的伺服技术相结合,可实现高速度和加速度性能。增强型手腕:该系列的手腕负载能力允许各种割炬工具(如传感器单元、伺服割炬和串联割炬)的可持续性。手腕也很纤细,允许进入小开口,从而可以在狭窄的空间和高密度安装中进行操作。此外,腕部是中空的,允许气体管线、焊炬电缆、公司、和送丝机电机电缆被保护并位于工业机器人手臂内部。这提供了的电缆管理、易于维护、焊炬电缆集成和更简单的设置,并导致更的焊接。减少占地面积并增加节省:ArcMate100iC不仅可以通过提高速度、更轻松的电缆维护和减少设置来节省。
FanucR-2000iA/165EW-内部集成电缆允许用户在连接控制器后立即开始生产-165kg有效负载和2,650mm范围,FanucR-2000iA/200EW-内部集成电缆允许用户在连接后立即开始生产连接控制器-200kg有效载荷和2,650mm范围。 新系统易于设置,因为这通常是客户对其他系统的大抱怨,冲压工艺冲压是一种通过一系列冲压站在钣金上进行的成型工艺,用于生产大量成品,冲压过程是由含有钢,铝,锌,镍,钛和黄铜的板材制成的金属的成型,金属板在冲压机中形成预设形状。

这种类型的工业机器人维护通常在轮班开始或结束时只需要5到10分钟,具体取决于系统的大小,预防性维护的佳是在预定的假期停工期间,这样可以避免缩短生产,并大限度地减少生产内发生故障的可能性,重大的预防性维护维修。 这有助于处理来自CAD/CAM系统的复杂程序,同时提供高度的准确性,所有这些技术协调都有助于简化工业机器人与现有CNC环境的集成,提高安全性:安全控制器集成到控制系统中,无需任何专有硬件,安全功能的通信是通过基于以太网的协议实现的。 降低了浪费和返工的成本,从事单调工作的人可能会感到[工人疲劳",并因制造不正确的产品而产生废品,工业机器人消除了这个问题,减少了产品浪费,吸引更多客户:自动化有助于以少的支出提供高的吞吐量,随着和成本的减少。
以自动化几乎所有手动任务,包括小批量或快速转换的任务,而无需更改生产布局,通用拾取和放置工业机器人还可以轻松地重复使用程序来执行重复性任务,所有UR机械臂均通过IP-54认证,安全系统通过TÜV(德国技术检验协会)认证。

命令使用户能够实现远程控制,半自主或自主的采矿设备系统。钻井命令和推土命令提供了一个自动化的系统,使操作员远离矿井并远离区域。可以在目标进行自动运输和钻孔,并提供有助于矿石取样和钻孔加载的反馈。牵引指挥系统也是一个自主的系统,利用了复杂的感知和车载情报技术。CommandforLongwall犁具有的自动化和远程操作功能,允许操作员在远离工作面的安全工作。由于高速计算机处理,它们通过分析、记录和可视化功能为他们提供了工作区域的清晰图片。CommandforUnderground是一个半自主系统,可自动执行Caterpillar装载运输自卸机的运输功能。可编程采矿控制系列为长壁系统组件的所有控制和传感器提供一站式采购服务。
在将的3D视觉选项(如对象跟踪,产品分析和箱拣选)整合到生产线时,系统应生成3D图像数据,在工业机器人系统中使用3D视觉需要集成各种组件以促进充足的电力供应,实时处理和安全性,成功自动化的另一个关键组成部分是通信能力。 因为它含有大量的EP(极压)添加剂,例如钼和锌化合物,合成润滑剂凌肯拥有自己的工业机器人润滑脂系列(包括MolyWhite和VIGO的变体),其中包括用于提高工业机器人性能和使用寿命的合成材料,我们与从事级润滑油和润滑油的工程师合作。
aihiqehoqhoi