日本川崎工业机器人维修保养图文结合 检查设备外部各轴连锁开关,未发现存在故障,初步判断,故障原因应该在设备外部旋转轴的个伺服电动机处,为进一步判断故障原因,测量伺服电动机侧抱闸电压为0V,而伺服放大器侧抱闸电压为正常电压24V,判断为伺服电动机抱闸未打开。
机器人出现奇偶错误通常与硬件通信或数据传输有关。具体来说,奇偶错误是一种在数据传输过程中检测到的错误类型,用于验证数据的完整性。当传输的数据中的“1”的个数为奇数或偶数时,会进行奇偶校验,如果接收方检测到的“1”的个数与发送方不一致,就会出现奇偶错误。……故障现象:伺服放大器显示SRVO–005SVAL1Robotovertrel报警信号。原因分析:机器人已经移动超出了硬件允许的行程开关轴移动的极限范围。制造厂家超行程状态是为了包装的目的。如果不使用超行程信号,则可能机械单元的短路(缺少电流)就会使机器人无法工作。解决方法:(措施1)1.在超行程释放屏幕下选择(系统OT释放)选项,释放每一个在超行程状态下的机器人的轴。2.握住Shift键,按下警报释放按钮来重置警报的条件。3.仍然握住Shift键,然后手动操作机器人让所有的轴在一定活动范围活动。(措施2)检查在伺服放大器上的FS2丝,如果SRVO-214丝烧断警报也产生。提供备件使用,减少您的损失。广州安川机电科技需要公司网站:gzanchuan@126库卡KPP600库卡驱动电源维修型号包括:KUKAKPP600-20/00160150/ECMAPOD3004BE531库卡配电箱维修KUKAKPP600-201x40维修库卡驱动电源KPP600-20-2x40维修KUKAKPP600-201x64维修库卡KPP600上有显示运行状态的LED,KUKAKPP600库卡驱动电源/配电箱维修故障包括:ERROR26112KUKAKPP600散热器温度过高(轴)ERROR26113库卡KPP600电机相位缺失(轴)ERROR26115KUKAKPP600收到未知的状态旗标(轴)ERROR26116库卡机器人驱动电源KPP600设备状态未知(轴)ERROR26118KUKAKPP600电源相位缺失(轴)ERROR26119库卡配电箱KPP600供电电源故障(轴)ERROR26120KUKAKPP600充电时过压(轴)ERROR26122库卡电源模块KPP600制动电阻出错(轴)库卡Power-Pack(KUKAKPP)是驱动电源。
采用替换法更换控制柜内部安全电路模块,更换同型号安全板后,故障排除,从而确定报警是由于安全板电路损坏导致,飞克机器人维修有限公司(faykrr)能够高质的提供库卡机器人控制柜维修,库卡机器人示教器维修,库卡机器人I/O板维修,库卡机器人驱动器维修,库卡机器人伺服电机维修,库卡机器人计算机板维修,。
示教器,川崎机器人伺服马达,电路板等,提供上门维修服务,全系列川崎机器人测试平台,免费提供技术咨询,川崎机器人维修常见报警代码查询:E0001未知错误,E0002[伺服板XX]CPUBUS错误,E0100存在异常的注释语句。
日本川崎工业机器人维修保养图文结合 1、硬件通信问题:机器人与外部设备或内部组件之间的通信可能出现问题,导致数据传输错误。这可能是由于通信线路损坏、连接不良或电磁干扰等原因引起的。 2、数据传输错误:在机器人内部,数据在传输过程中可能发生错误。这可能是由于数据传输速率不匹配、缓冲区溢出或数据传输协议错误等原因引起的。 3、内部编码错误:机器人的内部编码或程序可能存在错误,导致数据在处理或传输过程中出现奇偶错误。 4、硬件故障:机器人的硬件组件可能发生故障,如内存损坏、电路板上的元件失效等,这些故障可能导致数据传输错误。错误的设定工业机器人机械原点将会造成工业机器人动作受限或误动作,无法走直线等问题,严重的会损坏工业机器人。工业机器人50204动作监控报警如何解除?1.修改工业机器人动作监控参数(控制面板—动作监控菜单中)以匹配实际的情况。2.用AccSet指令降低工业机器人加速度。3.减小速度数据中的v_rot选项。工业机器人次上电开机报警“50296,SMB内存数据差异”怎么办?1.ABB主菜单中选择校准。2.ROB_1进入校准画面,选择SMB内存。3.选择“”,进入后“清除控制柜内存”。4.完成后“关闭”,然后“更新”。5.选择“已交换控制柜或机械手,使用SMB内存数据更新控制柜”。如何在RAPID程序里自定义工业机器人轨迹运动的速度?
则会发生奇偶校验报警,ALM912和ALM913分别提示低字节和高字节的报警,原因和处理:(1)SRAM中存储的数据不良,若每次接通电源,马上就发生报警,将电源关断,全清存储器(全清的操作方法是同时按住MDI面板上的RESET和DELET键。 DATA-,BAT,O,+5V,0V,FG,使用万用表一一测量并对照MS165电路图进行判别,结果7根连接线为正确连接,故障检修拆开编码器与电机紧固螺丝,查看电机,连轴器与编码器无异常且为正确安装。
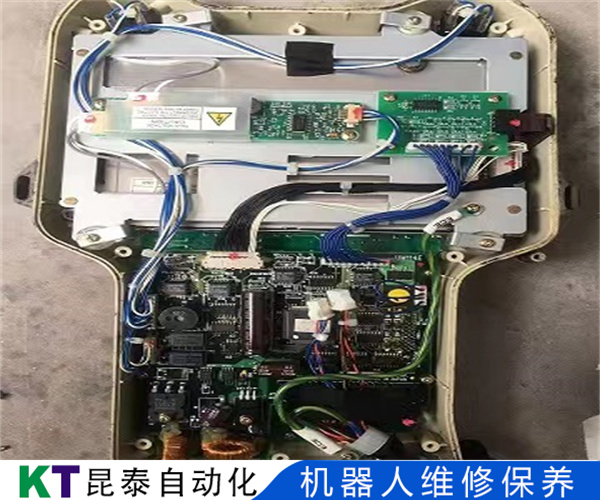
主要看:1.是否有断线和短路处;尤其是机器人电路板上的印制板连接线是否存在断裂,粘连等现象;2.有关元器件如电阻,电容,电感,二极管,三极管等是否存在断开现象;3.是否有人修理过?动过哪些元器件?是否存在虚焊,漏焊,插反插错等问题。排除上述状况后,这时候先用万用表测量机器人电路板电源与地之间的阻值,通常机器人电路板的阻值不应小于70Ω。若阻值太小,才几或十几欧姆。说明机器人电路板上有元器件被击穿或部分击穿,就采取措施将被击穿的元器件找出来。具体办法是给被修板加电机器人维修(注意!此时一定要搞清该板的工作电压的电压值与正负极性,不可接错和加入工作电压值。否则将对待修机器人电路板有伤害!老故障没排除。
 日本川崎工业机器人维修保养图文结合 1、检查硬件连接:确保机器人的所有硬件连接都正确且紧固,避免出现通信线路损坏或连接不良的情况。 2、优化数据传输:确保数据传输速率匹配,避免缓冲区溢出,并检查数据传输协议是否正确。 3、检查内部编码:审查机器人的内部编码和程序,确保没有错误或漏洞。 4、更换硬件组件:如果确定是硬件故障引起的奇偶错误,可以考虑更换损坏的硬件组件。
日本川崎工业机器人维修保养图文结合 1、检查硬件连接:确保机器人的所有硬件连接都正确且紧固,避免出现通信线路损坏或连接不良的情况。 2、优化数据传输:确保数据传输速率匹配,避免缓冲区溢出,并检查数据传输协议是否正确。 3、检查内部编码:审查机器人的内部编码和程序,确保没有错误或漏洞。 4、更换硬件组件:如果确定是硬件故障引起的奇偶错误,可以考虑更换损坏的硬件组件。 实现的技术难度大,且需要维护人员严格按照技术要求进行维护,所以相比波纹管管线包较为少见,下图是上海发那科的两款管线包产品,主要应用于点焊和搬运应用,CPP管线包SDP管线包材质材质方面,CPP管线包的特点是使用塑料件作为外护套。因此社会化大生产的发展就要依靠科学技术的发展来发明新机器、新材料、新工艺和新产品,从而推动社会化大生产的历史性大跨越。生产工艺越来越精密,当前精密和超精密加工精度从微米到亚微米,乃至纳米,在汽车、家电、IT电子信息高技术领域和、民用工业有广泛应用。同时,精密和超精密加工技术的发展也促进了机械、模具、液压、电子、半导体、光学、传感器和测量技术及金属加工工业的发展,更多的数控加工设备投入到生产加工的行业中来,所以一场真正的工业现已到来。伺服维修、伺服驱动器维修具实力的维修站技术直线:工控设备维修工控设备维修>派克parker伺服电机维修1产品编:Pro工控设备维修|产品名称:派克parker伺服电机维修1产品编:Pro产品PAIKER派克伺服驱动维修服务。
程序出错或控制器已被烧毁,解决方法:需要更新控制器的程序将烧毁的输入输出点通过软件改到备用触电上面用,必要时更换控制器,变频器经常报故障,参数不正确,变频器老化,水泵过载,缺相,线路松动,安川机器人维修解决方法:先将变频器复位。

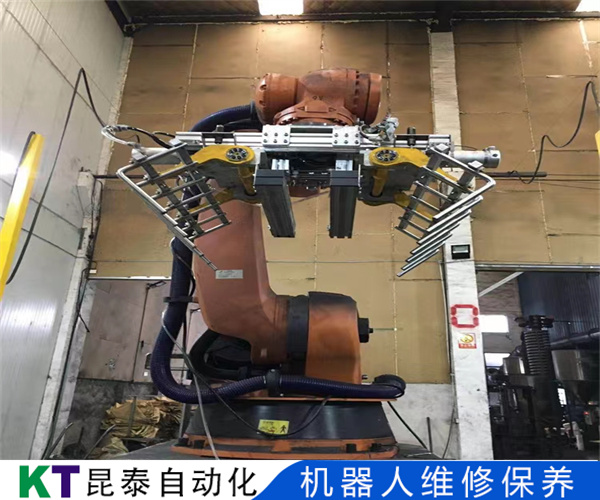
还包括福尼斯焊机维修,埃姆哈特EMHART焊机维修,NSW焊机维修,安川机器人焊机维修,米勒焊机设备,美国飞马特焊机设备维修等,机器人焊机维修机器人焊机维修>库卡机器人焊机维修-KEMPPI科比焊机维修产品编:Pro机器人焊机维修 |产品名称:库卡机器人焊机维修-KEMPPI科比焊机维修产。 管理robware5版本,利用系统文件里的controlKey和DriveKey通过U盘(是空盘)进行引导创建系统创建将创建好的系统通过系统启动界面的,选择安装系统利用电脑(Ip改为自动获取),通过机器人service端口进行联机。进行1,2轴排油并进行排油量登记操作,做好费油存放处理。调整好机器人注油姿态,注油量根据排油量多少结合保养手册决定,并做好注油量记录;1,2轴添加XP320润滑油脂(另一台IRB6640进行同样作业)。换油作业过程记录本体清洁工作所有机器人进行本体清灰处理工作,多余油脂清理工作,并检查各轴电封圈有无漏油情况。更换电池操作所有机器人回到原点,保持电源接通,进行本体电池更换工作;其中一台IRB1410报警CMOS电池电压耗尽,需进行更换,关闭控制柜电源,打开柜门,在断电5S内进行系统纽扣电池更换工作。更换散热风扇所有机器人关掉控制柜电源,进行控制柜散热风扇更换工作,并进行清灰处理。更换易损配件所有ABB机器人关掉控制柜电源。
TgEfOguVtKf












